TSBB21 Computational Photography
The course TSBB21 is given in the second period of the autumn semester, HT2.
It gives 6 ECTS credit points.
This course was previously called TSBB09 Image Sensors (2021 and earlier).
This page is valid for autumn semester 2023-HT2.
Note that some updates will be made, though.
Examiner: Maria Magnusson
Director of Studies: Lasse Alfredsson
Note for 2023:
Most of the course information is here.
The lecture slides are here.
Old recorded lecture slides (video) from 2021 onwards will be in Lisam.
Official Study information
Course information
Literature
Lectures
Laboratory assignments
Examination
Course content overview
The course describes the function of modern digital cameras (for still and video images).
We analyze the process that from a luminous flux into the camera forms pixel values that
can be combined and corrected through integrated calculations and finally read out in the
form of an image. The collective name for this process is computational photography, and
this includes optics, geometry, electronics and the calculations that improve the end result.
Special types of cameras such as infrared cameras and distance cameras are also covered in
the course. Main topics of the course are:
-
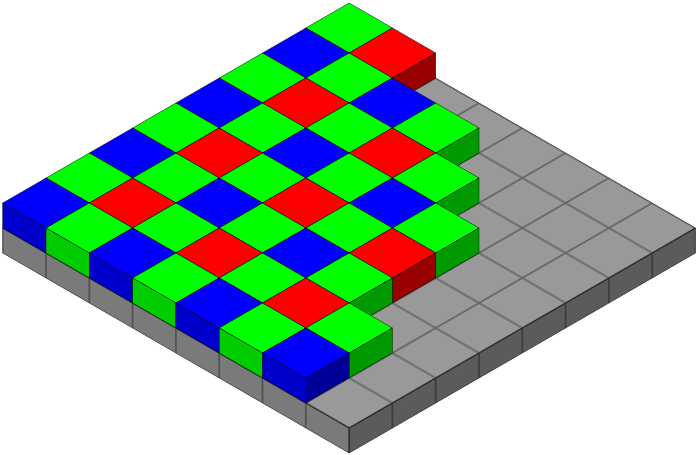
The digital camera: sensor structure, bayer patterns, noise sources, lens effects, etc.
Image source: Wikipedia
- 3D visualization: simulation of the light source interaction with surfaces and volumes
-
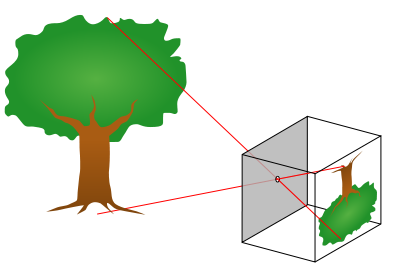
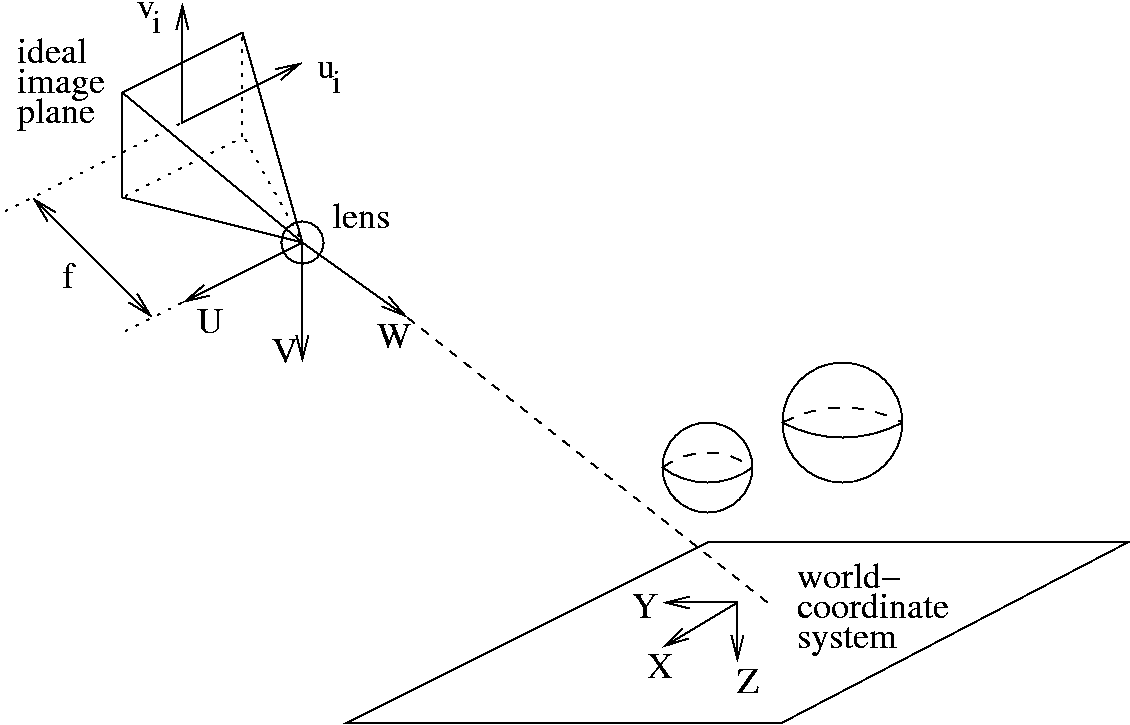
Camera geometry: the pinhole camera, projective geometry, homogeneous coordinates, homography
Image source: Wikimedia, Maria Magnusson
-
Camera calibration and an application: panorama stitching

-
Infrared and multispectral cameras
Image source: Jörgen Ahlberg

-
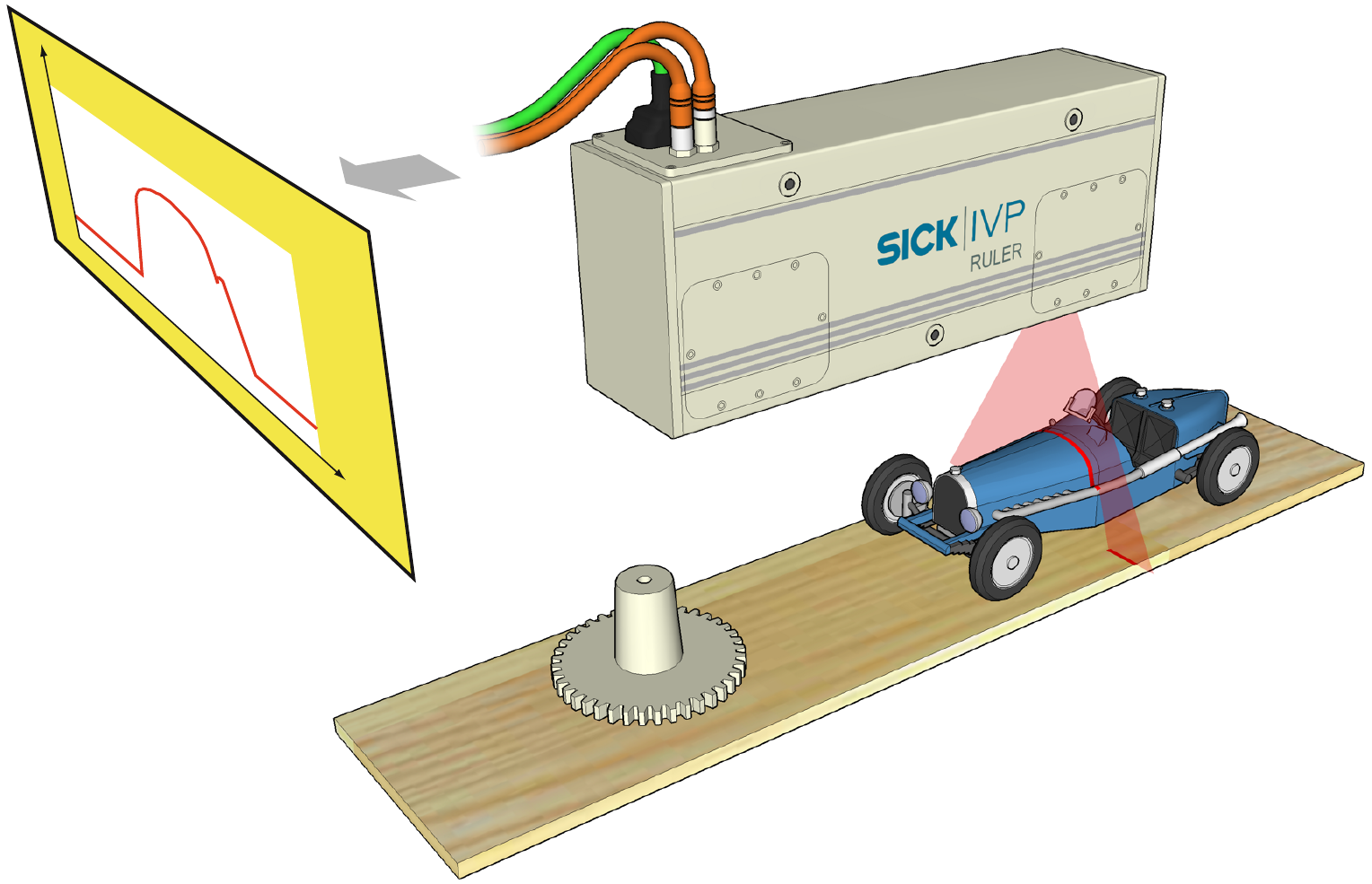
Range cameras and point clouds
Image source: SICK
- Specialized cameras, e.g. high dynamic range (HDR), coded aperture